I am currently in secondment at Inria Paris, as a researcher in the CAGE team.
I work on control, stabilization and optimal control problems in infinite dimension (PDEs and evolution equation), with a particular focus on constrained control.
I have also dabbled in data-driven modelling and control, in particular methods involving the Koopman operator.
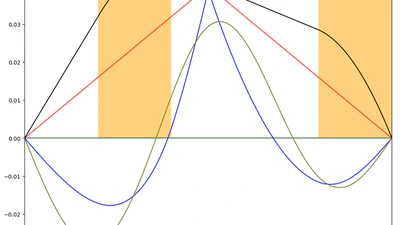
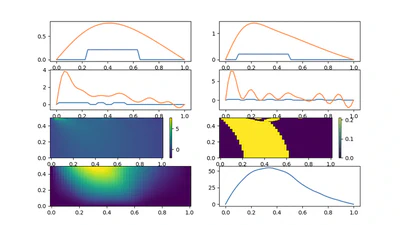
More recently, I have taken an interest in reachability analysis. I co-supervised the PhD thesis of Ivan Hasenohr with Camille Pouchol and Yannick Privat, during which we developed computer-assisted proofs of reachability and non-reachability.